 |
Blender V2.61 - r43446
|
|
Blender V2.61 - r43446
|
#include <btConcaveShape.h>
Public Member Functions | |
| btConcaveShape () | |
| virtual | ~btConcaveShape () |
| virtual void | processAllTriangles (btTriangleCallback *callback, const btVector3 &aabbMin, const btVector3 &aabbMax) const =0 |
| virtual btScalar | getMargin () const |
| virtual void | setMargin (btScalar collisionMargin) |
Protected Attributes | |
| btScalar | m_collisionMargin |
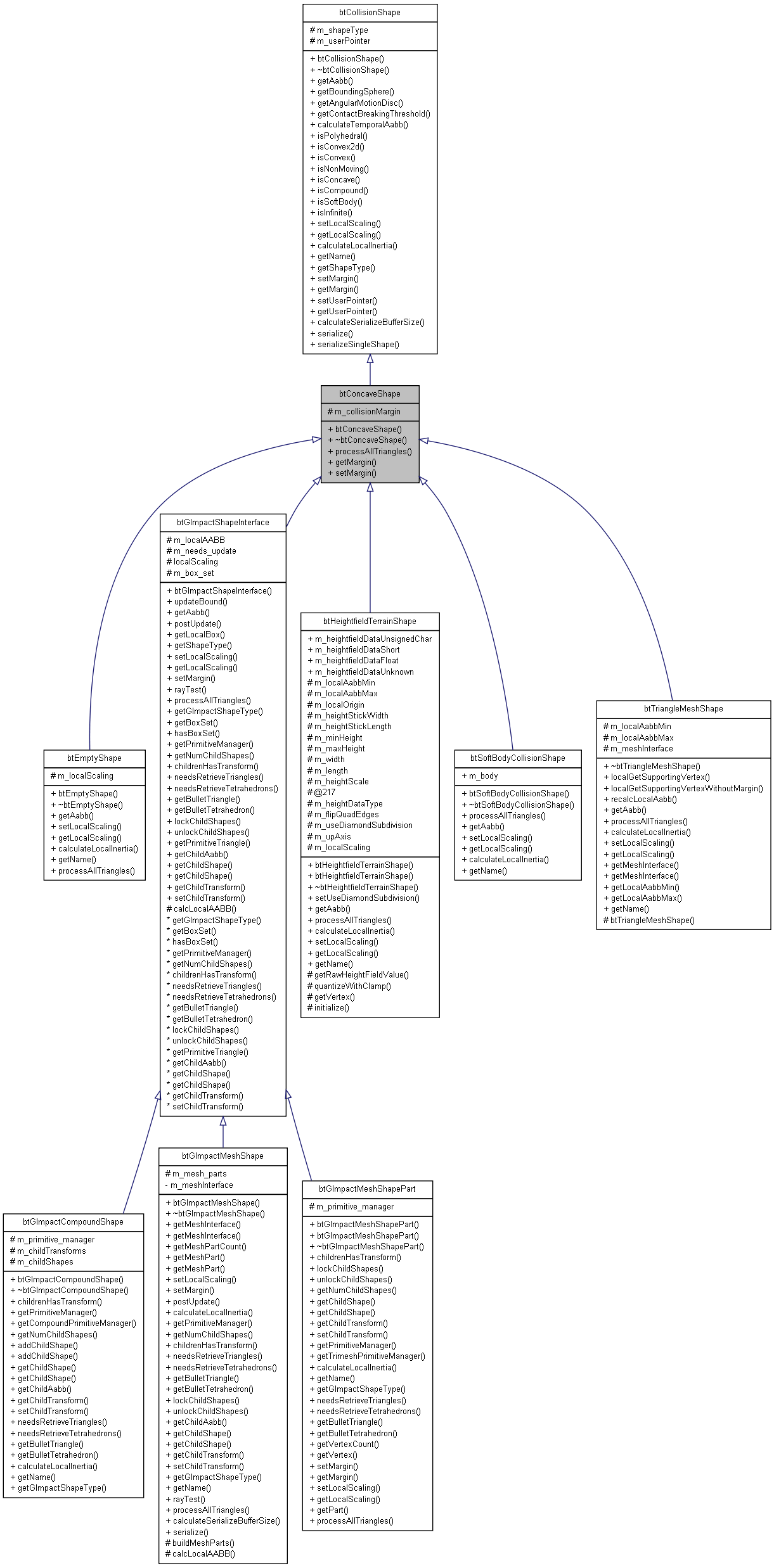
The btConcaveShape class provides an interface for non-moving (static) concave shapes. It has been implemented by the btStaticPlaneShape, btBvhTriangleMeshShape and btHeightfieldTerrainShape.
Definition at line 36 of file btConcaveShape.h.
| btConcaveShape::btConcaveShape | ( | ) |
Definition at line 19 of file btConcaveShape.cpp.
| btConcaveShape::~btConcaveShape | ( | ) | [virtual] |
Definition at line 24 of file btConcaveShape.cpp.
| virtual btScalar btConcaveShape::getMargin | ( | ) | const [inline, virtual] |
Implements btCollisionShape.
Reimplemented in btGImpactMeshShapePart.
Definition at line 48 of file btConcaveShape.h.
References m_collisionMargin.
Referenced by btHeightfieldTerrainShape::getAabb(), btTriangleMeshShape::getAabb(), btEmptyShape::getAabb(), btSoftClusterCollisionShape::getMargin(), btGImpactCollisionAlgorithm::gimpact_vs_concave(), btCollisionWorld::objectQuerySingle(), btConvexConcaveCollisionAlgorithm::processCollision(), and btSoftBodyConcaveCollisionAlgorithm::processCollision().
| virtual void btConcaveShape::processAllTriangles | ( | btTriangleCallback * | callback, |
| const btVector3 & | aabbMin, | ||
| const btVector3 & | aabbMax | ||
| ) | const [pure virtual] |
Implemented in btEmptyShape, btHeightfieldTerrainShape, btTriangleMeshShape, btGImpactShapeInterface, btGImpactMeshShapePart, btGImpactMeshShape, and btSoftBodyCollisionShape.
Referenced by btConvexConcaveCollisionAlgorithm::calculateTimeOfImpact(), btSoftBodyConcaveCollisionAlgorithm::calculateTimeOfImpact(), btCollisionWorld::debugDrawObject(), btGImpactCollisionAlgorithm::gimpact_vs_concave(), btCollisionWorld::objectQuerySingle(), btConvexConcaveCollisionAlgorithm::processCollision(), btSoftBodyConcaveCollisionAlgorithm::processCollision(), and btCollisionWorld::rayTestSingle().
| virtual void btConcaveShape::setMargin | ( | btScalar | collisionMargin | ) | [inline, virtual] |
Implements btCollisionShape.
Reimplemented in btGImpactShapeInterface, btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 51 of file btConcaveShape.h.
References m_collisionMargin.
Referenced by btSoftClusterCollisionShape::btSoftClusterCollisionShape(), and btSoftClusterCollisionShape::setMargin().
btScalar btConcaveShape::m_collisionMargin [protected] |
Definition at line 39 of file btConcaveShape.h.
Referenced by getMargin(), btTriangleMeshShape::recalcLocalAabb(), btGImpactMeshShape::serialize(), btGImpactShapeInterface::setMargin(), btGImpactMeshShape::setMargin(), and setMargin().