 |
Blender V2.61 - r43446
|
|
Blender V2.61 - r43446
|
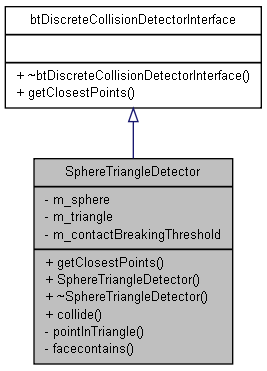
sphere-triangle to match the btDiscreteCollisionDetectorInterface More...
#include <SphereTriangleDetector.h>
Public Member Functions | |
| virtual void | getClosestPoints (const ClosestPointInput &input, Result &output, class btIDebugDraw *debugDraw, bool swapResults=false) |
| SphereTriangleDetector (btSphereShape *sphere, btTriangleShape *triangle, btScalar contactBreakingThreshold) | |
| virtual | ~SphereTriangleDetector () |
| bool | collide (const btVector3 &sphereCenter, btVector3 &point, btVector3 &resultNormal, btScalar &depth, btScalar &timeOfImpact, btScalar contactBreakingThreshold) |
sphere-triangle to match the btDiscreteCollisionDetectorInterface
Definition at line 29 of file SphereTriangleDetector.h.
| SphereTriangleDetector::SphereTriangleDetector | ( | btSphereShape * | sphere, |
| btTriangleShape * | triangle, | ||
| btScalar | contactBreakingThreshold | ||
| ) |
Definition at line 22 of file SphereTriangleDetector.cpp.
| virtual SphereTriangleDetector::~SphereTriangleDetector | ( | ) | [inline, virtual] |
Definition at line 35 of file SphereTriangleDetector.h.
| bool SphereTriangleDetector::collide | ( | const btVector3 & | sphereCenter, |
| btVector3 & | point, | ||
| btVector3 & | resultNormal, | ||
| btScalar & | depth, | ||
| btScalar & | timeOfImpact, | ||
| btScalar | contactBreakingThreshold | ||
| ) |
Definition at line 94 of file SphereTriangleDetector.cpp.
References btSqrt(), cross(), distance(), i, SegmentSqrDistance(), and SIMD_EPSILON.
Referenced by getClosestPoints().
| void SphereTriangleDetector::getClosestPoints | ( | const ClosestPointInput & | input, |
| Result & | output, | ||
| class btIDebugDraw * | debugDraw, | ||
| bool | swapResults = false |
||
| ) | [virtual] |
Implements btDiscreteCollisionDetectorInterface.
Definition at line 30 of file SphereTriangleDetector.cpp.
References btDiscreteCollisionDetectorInterface::Result::addContactPoint(), collide(), btTransform::getBasis(), btTransform::getOrigin(), btTransform::inverseTimes(), btDiscreteCollisionDetectorInterface::ClosestPointInput::m_transformA, and btDiscreteCollisionDetectorInterface::ClosestPointInput::m_transformB.