 |
Blender V2.61 - r43446
|
|
Blender V2.61 - r43446
|
#include <btDefaultCollisionConfiguration.h>
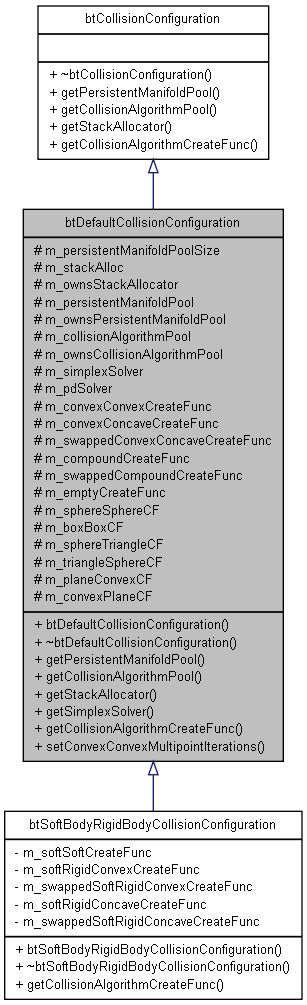
btCollisionConfiguration allows to configure Bullet collision detection stack allocator, pool memory allocators
Definition at line 52 of file btDefaultCollisionConfiguration.h.
| btDefaultCollisionConfiguration::btDefaultCollisionConfiguration | ( | const btDefaultCollisionConstructionInfo & | constructionInfo = btDefaultCollisionConstructionInfo() | ) |
calculate maximum element size, big enough to fit any collision algorithm in the memory pool
Definition at line 42 of file btDefaultCollisionConfiguration.cpp.
References btAlignedAlloc, btMax(), m_boxBoxCF, m_collisionAlgorithmPool, btDefaultCollisionConstructionInfo::m_collisionAlgorithmPool, m_compoundCreateFunc, m_convexConcaveCreateFunc, m_convexConvexCreateFunc, m_convexPlaneCF, btDefaultCollisionConstructionInfo::m_customCollisionAlgorithmMaxElementSize, btDefaultCollisionConstructionInfo::m_defaultMaxCollisionAlgorithmPoolSize, btDefaultCollisionConstructionInfo::m_defaultMaxPersistentManifoldPoolSize, btDefaultCollisionConstructionInfo::m_defaultStackAllocatorSize, m_emptyCreateFunc, m_ownsCollisionAlgorithmPool, m_ownsPersistentManifoldPool, m_ownsStackAllocator, m_pdSolver, btDefaultCollisionConstructionInfo::m_persistentManifoldPool, m_persistentManifoldPool, m_planeConvexCF, m_simplexSolver, m_sphereSphereCF, m_sphereTriangleCF, m_stackAlloc, btDefaultCollisionConstructionInfo::m_stackAlloc, btCollisionAlgorithmCreateFunc::m_swapped, m_swappedCompoundCreateFunc, m_swappedConvexConcaveCreateFunc, m_triangleSphereCF, and btDefaultCollisionConstructionInfo::m_useEpaPenetrationAlgorithm.
| btDefaultCollisionConfiguration::~btDefaultCollisionConfiguration | ( | ) | [virtual] |
Definition at line 145 of file btDefaultCollisionConfiguration.cpp.
References btAlignedFree, btStackAlloc::destroy(), m_boxBoxCF, m_collisionAlgorithmPool, m_compoundCreateFunc, m_convexConcaveCreateFunc, m_convexConvexCreateFunc, m_convexPlaneCF, m_emptyCreateFunc, m_ownsCollisionAlgorithmPool, m_ownsPersistentManifoldPool, m_ownsStackAllocator, m_pdSolver, m_persistentManifoldPool, m_planeConvexCF, m_simplexSolver, m_sphereSphereCF, m_sphereTriangleCF, m_stackAlloc, m_swappedCompoundCreateFunc, m_swappedConvexConcaveCreateFunc, m_triangleSphereCF, btCollisionAlgorithmCreateFunc::~btCollisionAlgorithmCreateFunc(), btConvexPenetrationDepthSolver::~btConvexPenetrationDepthSolver(), btPoolAllocator::~btPoolAllocator(), and btStackAlloc::~btStackAlloc().
| btCollisionAlgorithmCreateFunc * btDefaultCollisionConfiguration::getCollisionAlgorithmCreateFunc | ( | int | proxyType0, |
| int | proxyType1 | ||
| ) | [virtual] |
Implements btCollisionConfiguration.
Reimplemented in btSoftBodyRigidBodyCollisionConfiguration.
Definition at line 214 of file btDefaultCollisionConfiguration.cpp.
References BOX_SHAPE_PROXYTYPE, m_boxBoxCF, m_compoundCreateFunc, m_convexConcaveCreateFunc, m_convexConvexCreateFunc, m_convexPlaneCF, m_emptyCreateFunc, m_planeConvexCF, m_sphereSphereCF, m_sphereTriangleCF, m_swappedCompoundCreateFunc, m_swappedConvexConcaveCreateFunc, m_triangleSphereCF, SPHERE_SHAPE_PROXYTYPE, STATIC_PLANE_PROXYTYPE, and TRIANGLE_SHAPE_PROXYTYPE.
| virtual btPoolAllocator* btDefaultCollisionConfiguration::getCollisionAlgorithmPool | ( | ) | [inline, virtual] |
Implements btCollisionConfiguration.
Definition at line 105 of file btDefaultCollisionConfiguration.h.
References m_collisionAlgorithmPool.
| virtual btPoolAllocator* btDefaultCollisionConfiguration::getPersistentManifoldPool | ( | ) | [inline, virtual] |
memory pools
Implements btCollisionConfiguration.
Definition at line 100 of file btDefaultCollisionConfiguration.h.
References m_persistentManifoldPool.
| virtual btVoronoiSimplexSolver* btDefaultCollisionConfiguration::getSimplexSolver | ( | ) | [inline, virtual] |
Definition at line 115 of file btDefaultCollisionConfiguration.h.
References m_simplexSolver.
| virtual btStackAlloc* btDefaultCollisionConfiguration::getStackAllocator | ( | ) | [inline, virtual] |
Implements btCollisionConfiguration.
Definition at line 110 of file btDefaultCollisionConfiguration.h.
References m_stackAlloc.
| void btDefaultCollisionConfiguration::setConvexConvexMultipointIterations | ( | int | numPerturbationIterations = 3, |
| int | minimumPointsPerturbationThreshold = 3 |
||
| ) |
Use this method to allow to generate multiple contact points between at once, between two objects using the generic convex-convex algorithm. By default, this feature is disabled for best performance.
| numPerturbationIterations | controls the number of collision queries. Set it to zero to disable the feature. |
| minimumPointsPerturbationThreshold | is the minimum number of points in the contact cache, above which the feature is disabled 3 is a good value for both params, if you want to enable the feature. This is because the default contact cache contains a maximum of 4 points, and one collision query at the unperturbed orientation is performed first. See Bullet/Demos/CollisionDemo for an example how this feature gathers multiple points. |
Definition at line 293 of file btDefaultCollisionConfiguration.cpp.
References m_convexConvexCreateFunc, btConvexConvexAlgorithm::CreateFunc::m_minimumPointsPerturbationThreshold, and btConvexConvexAlgorithm::CreateFunc::m_numPerturbationIterations.
Definition at line 86 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 66 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), btSoftBodyRigidBodyCollisionConfiguration::btSoftBodyRigidBodyCollisionConfiguration(), getCollisionAlgorithmPool(), and ~btDefaultCollisionConfiguration().
Definition at line 77 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_convexConcaveCreateFunc [protected] |
Definition at line 75 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_convexConvexCreateFunc [protected] |
Definition at line 74 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), setConvexConvexMultipointIterations(), and ~btDefaultCollisionConfiguration().
Definition at line 90 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 79 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
bool btDefaultCollisionConfiguration::m_ownsCollisionAlgorithmPool [protected] |
Definition at line 67 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), btSoftBodyRigidBodyCollisionConfiguration::btSoftBodyRigidBodyCollisionConfiguration(), and ~btDefaultCollisionConfiguration().
bool btDefaultCollisionConfiguration::m_ownsPersistentManifoldPool [protected] |
Definition at line 63 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), and ~btDefaultCollisionConfiguration().
bool btDefaultCollisionConfiguration::m_ownsStackAllocator [protected] |
Definition at line 60 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), and ~btDefaultCollisionConfiguration().
Definition at line 71 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), and ~btDefaultCollisionConfiguration().
Definition at line 62 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getPersistentManifoldPool(), and ~btDefaultCollisionConfiguration().
int btDefaultCollisionConfiguration::m_persistentManifoldPoolSize [protected] |
Definition at line 57 of file btDefaultCollisionConfiguration.h.
Definition at line 89 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 70 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getSimplexSolver(), and ~btDefaultCollisionConfiguration().
Definition at line 80 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 87 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 59 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getStackAllocator(), and ~btDefaultCollisionConfiguration().
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_swappedCompoundCreateFunc [protected] |
Definition at line 78 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
btCollisionAlgorithmCreateFunc* btDefaultCollisionConfiguration::m_swappedConvexConcaveCreateFunc [protected] |
Definition at line 76 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().
Definition at line 88 of file btDefaultCollisionConfiguration.h.
Referenced by btDefaultCollisionConfiguration(), getCollisionAlgorithmCreateFunc(), and ~btDefaultCollisionConfiguration().